
La vision 3D Solomon dans votre processus de production
Avec son software AccuPick 3D, Solomon propose un nouveau système de vision 3D permettant une sélection 3D rapide, intelligente et précise pour toutes les opérations d’usinage, les applications de kitting et d’assemblage, de palettisation/dépalettisation y compris le bin picking.
La reconnaissance 3D des objets aux formes complexes, traditionnellement impossible avec la méthode de mise en correspondance CAO, devient possible grâce au Deep Learning. Grâce à une technologie avancée, AccuPick 3D vous aide à relever tous vos défis d’automatisation nécessitant la vision. La solution est applicable sur 16 marques de robots dont les nouveaux robots collaboratifs Doosan Robotics. Zoom sur une technologie de pointe !
HumaRobotics a testé pour vous : la vision 3D Solomon sur une application de devracage 3D
Relevez vos défis de dévracage 3D (ou bin picking) ! En vidéo, découvrez une solution de dévracage 3D grâce au système de vision 3D Solomon. Basée sur l’IA, AccuPick 3D est un logiciel qui vous permet d’apprendre à reconnaître les objets, même ceux avec des caractéristiques et des spécificités particulières. Cette application a été programmée en moins de 3h00. Placés en vrac dans un panier, les boîtes de gâteaux sont saisies une à une par le robot collaboratif M0609 Doosan et triées en fonction de leur goût : framboise, chocolat, beurre ou noix de coco. Bluffant ! https://www.youtube.com/embed/zpO3URj9hEs
La technologie Solomon assure :
- La planification des points de passage pour éviter les collisions dans les bacs.
- La détection de pièces très petites (inférieures à 1 cm).
- Le traitement des pièces de tailles, formes, couleurs et matières variées.
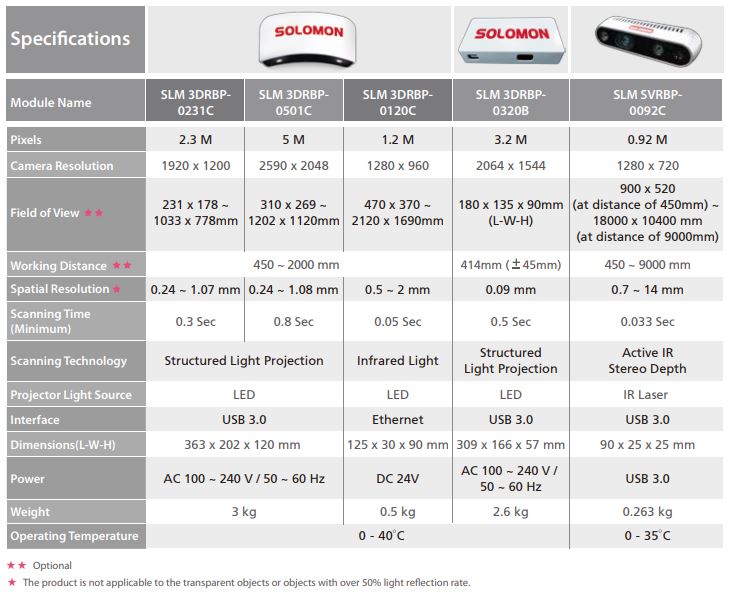
Caractéristiques techniques caméra 3D Solomon
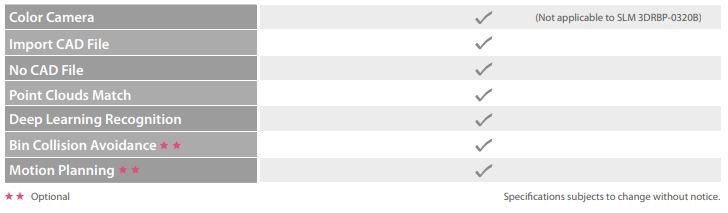
En fonction des besoins, les utilisateurs peuvent choisir le système de vision 3D Solomon le plus adapté à leur application – parmi les modules associés au software AccuPick 3D :
Vidéos de démonstration de la solution Solomon AccuPick 3D :
Ci-dessous, découvrez une vidéo présentant l’interface utilisateur Solomon sur une application de contrôle vision. Il s’agit par ailleurs d’une réelle démonstration du Deep Learning: https://www.youtube.com/embed/XOk_zcK5AxA
Dans le cadre de projets de robotique collaborative et de problématiques liées à l’